")
")
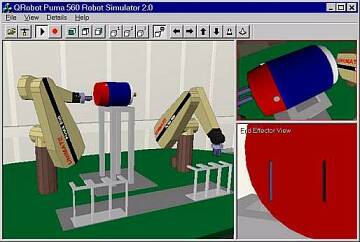
Windows software that animates robot manipulators along trajectories streamed from robot control programs. With the same robot control program, either the simulator can be run or the real robot manipulator.
| Project Date | 1998 - 1999 |
|---|---|
| Customer | Clemson University, USA |
| Operating System | Windows NT |
| Programming Environment | C++, GNU, Watcom |
| Technologies | Socket communication, 3D graphics (OpenGL) |
| Impact | Allowed testing robot control programs without the risk of damaging hardware before trying them on the real robot |
Screenshot